中国空间站机械臂和加拿大2号机械臂差距有多大?
用户投稿专用号
•
•
综合文章 •
阅读 17
中国空间站机械臂和加拿大臂2客观地说还是有些差距,不过对于中国航天技术来说已经是一个巨大的跳跃了,没有哪个国家的空间站起步就要对标世界顶尖技术的,而且中国机械臂在操控上延续了“好用”这一原则,不仅可以做到在空间站和地面控制中心进行操作,而且...
中国空间站的宇航员成功完成了首次出舱任务,这对我国来说是一个突破性的挑战。2008年,神舟七的出舱活动完成了中国人的首次太空行走,向全世界人民展示了太空中的五星红旗。但是,神舟七的出舱活动并没有开展出舱活动以外的所有工作,所以可以说,天和的出舱活动是一个重大突破。
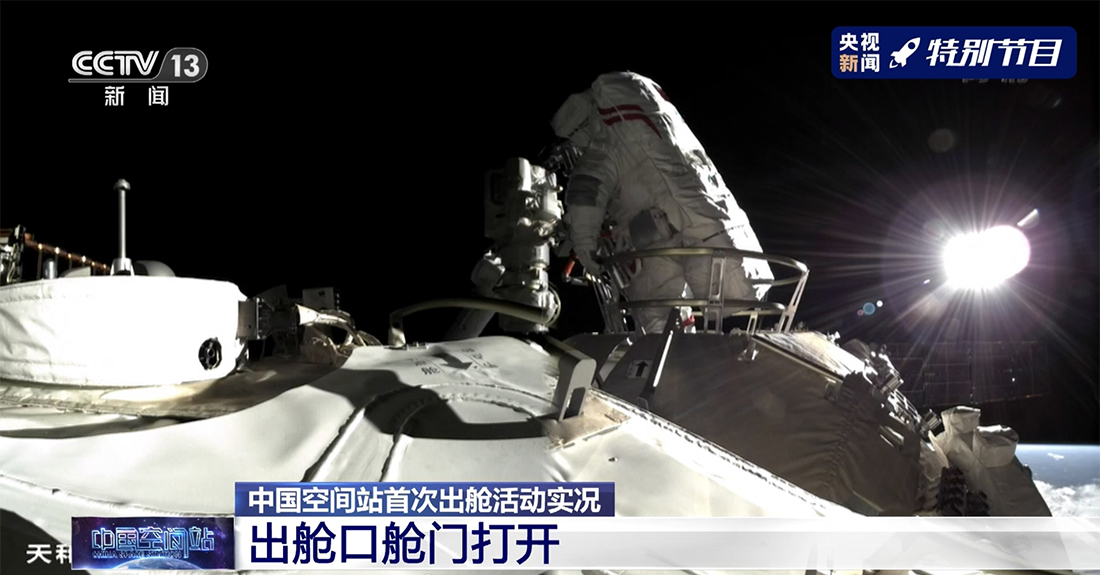
细心的朋友还注意到,这次出舱活动的主要工作是为空间站上的机械臂安装脚约束和舱外工作台。我们知道,空间站升空后,可以说只是一个开始,还需要做后续工作,包括组装、舱外检查、维护等。如果把这些工作都交给航天员,更别说失重环境下的工作效率了,长时间暴露在太空中会有很多安全隐患。因此,空间站上机械臂的存在是非常必要的。
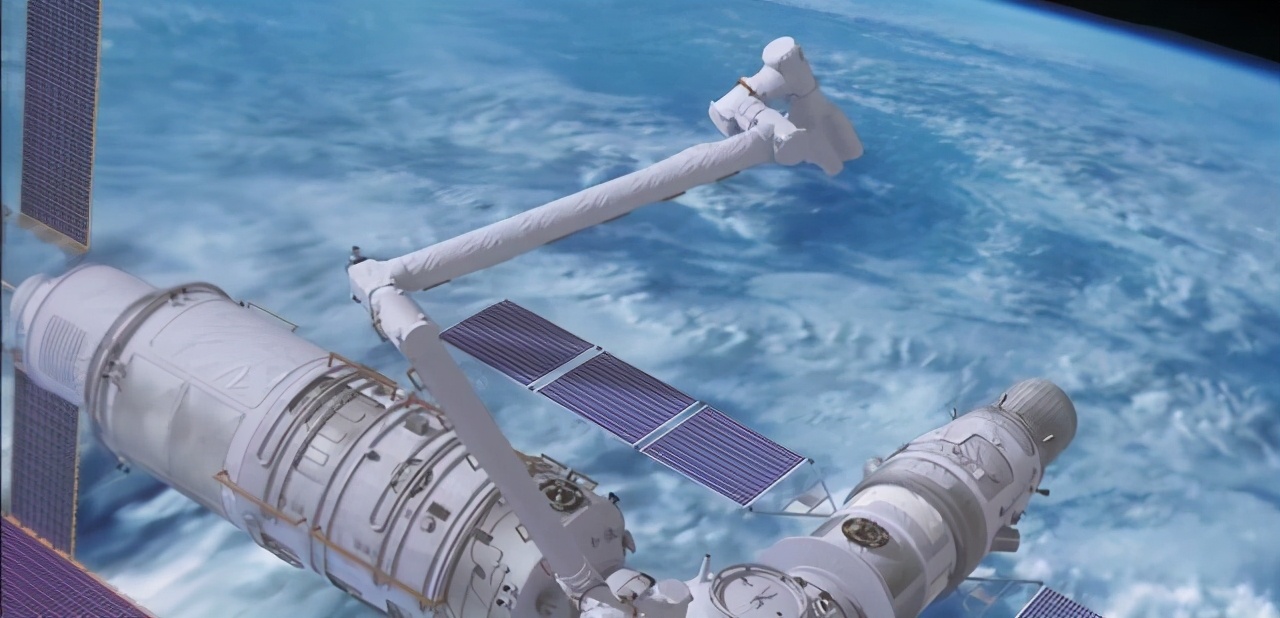
中国空间站机械臂最大的特点之一就是可以在舱外爬行,满足覆盖整个空间站的工作要求。这里有些人会很困惑。中国空间站的机械臂和国际空间站的加拿大臂2哪个更先进?首先,—— 加拿大Arm 2更先进,但中国Arm更实用。
中国空间站机械臂与加拿大臂2的差距在哪
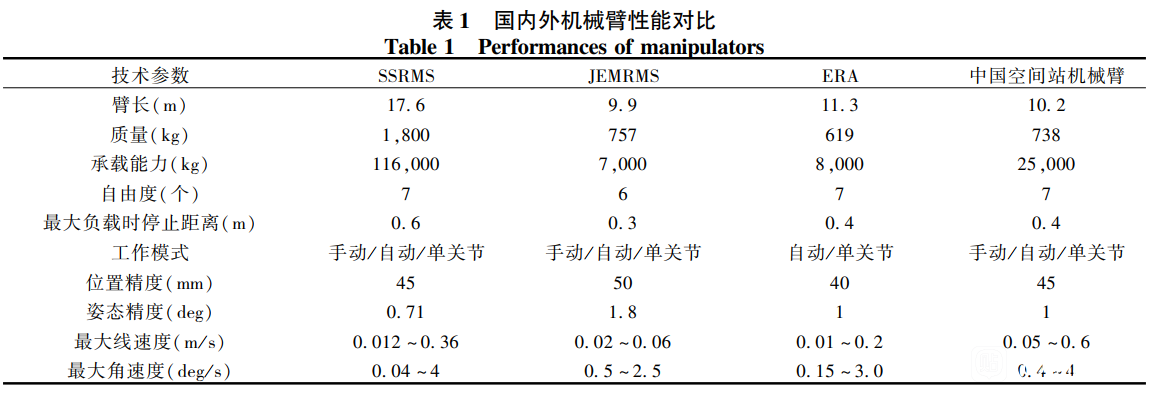
中国空间站机械臂系统简称为CSSRMS。主机械臂(CMM)通常系泊在天和堆芯舱小柱段底部,机械臂展开长度达到10.2米,分为两个臂和七个活动关节。原计划后续会有一个基于实验舱研制的5m左右的辅助机械臂(EMM),既能满足出舱工作“左右开弓”的要求,又能组合成更长的机械臂。
机械臂两端装有末端执行器,顶部的四个凸点用于传输交互数据、视频信号和电源。天和号的核心舱外还安装了许多适配器,适配器的作用就像攀岩比赛中的“抓点”。机械臂运动时,会先在舱体上寻找适配器,然后末端执行器抓住适配器,达到固定的目的。固定后,机械臂的另一端会寻找下一个适配器,第一个转弯会让它在舱外爬行。
许多人认为这项技术是由中国航天公司首创的,但实际上,国际空间站上的加拿大Arm 2已经应用了这项技术。然而,对于加拿大Arm 2,其操作条件要复杂得多。
首先,国际空间站自1998年正式建立以来,经过十几年的建设,已经全面投入使用。然而,加拿大Arm 2作为后来的设计,并没有完全覆盖国际空间站外的适配器。因此,加拿大臂2通常固定在轨道车上,轨道车可以和加拿大臂2一起在108米长的轨道上滑行。
azy" class="puzdy-theme alignnone size-full wp-image-56808" src="https://www.puzdy.com/wp-content/uploads/2022/06/1632376241-1a26207e42ec101.jpg" alt="一个能爬行,一个靠轨道,中国空间机械臂和加拿大臂2差距有多大" width="640" height="424">
其次,加拿大臂2的重量非常夸张,达到了1.8吨,相应地它最大可以移动116吨的物体,如此巨大的重量和抓取力对于适配器的强度有着非常高的要求,也就不难理解为什么有适配器的情况下还要选择固定在轨道车上了。反观中国的机械臂,只有738千克,可以移动25吨的物体,综合起来对适配器强度要求要低得多,不过鉴于中国空间站和国际空间站的大小差距,客观地说中国机械臂更加符合实际需要,没必要设计如此巨大的抓取力。
当然,移动能力都是为了满足工作需要而设计的,国际空间站上还有两个不可移动的机械臂,中国机械臂与加拿大臂2差距最大的还是在机械手上,加拿大臂2配备了一个仿生手,可以做到不需要适配器抓取不规则物体,相信很多朋友都见过中国空间站机械臂剪太阳板的动图,目前还达不到这个要求,不过未来如果需要的话,配一个“剪刀”也不是不可以。
机械臂最看重的并不在移动能力上
作为外行人,我们对于机械臂的关注点主要还在于在舱外爬来爬去的新奇点,不过对于机械臂来说,最重要的还是自由度上。
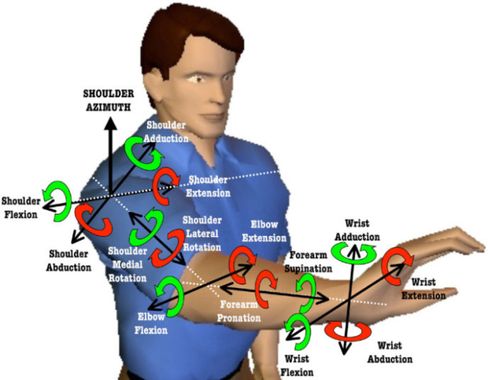
中国空间站机械臂和加拿大臂2都是7个自由度,包括肩部3个关节、肘部1个关节和腕部3个关节,这样的设计完全仿生了人类的手臂,人类手臂从肩部到腕部就有7个自由度,比起第一代加拿大臂的6个自由度,多出来的一个自由度差别可谓是非常大。
就拿生活中的例子来说,如果我们在拧钥匙的时候少了一个自由度,开钥匙的姿势就会变得非常的难受,不是蹲下对准锁孔,就是身体带动手腕旋转,无奈中做个一个全身运动,我们在看工厂内的机械臂在工作的时候往往要大幅度的上下移动,其中原因并不是摆弄对机械臂控制力有多强,而是单纯的自由度不够,所以只能通过大幅度的调整姿势和角度来满足工作需要。
可以说中国空间站机械臂自设计之初就对标了世界最先进的设计,7个自由度更加灵活方便,也可以做出更多的动作。
当然机械臂的发展并不是一开始就往6个自由度上设计的,最初苏联在和平号上就设计了一款可以称为机械臂鼻祖的自动对接系统(ASPR),当时的空间站新对接的舱采用轴向对接,成功对接后就需要自动对接系统将舱的角度旋转90°,方便下一个对接舱对接。那时的机械臂非常的短小,自动度也很低,但是好用就行了,这一原则也延续了下来,评价一套空间站的配套工具,好用永远是王道。
结语
中国空间站机械臂和加拿大臂2客观地说还是有些差距,不过对于中国航天技术来说已经是一个巨大的跳跃了,没有哪个国家的空间站起步就要对标世界顶尖技术的,而且中国机械臂在操控上延续了“好用”这一原则,不仅可以做到在空间站和地面控制中心进行操作,而且还能按照程序自动完成一些工作,这让不断升级依然无法做到自动化的加拿大臂2非常羡慕。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 puzdycom@126.com 举报,一经查实,本站将立刻删除。